CHAPTER 2.4
Looking for Patterns
From spatial to temporal visualizations
After the unsuccessful first iterations of our GPS visualizations, it became clear that we had to rethink our communicative form. To look for patterns that made sense visually and contextually, we returned to a process of data-gathering and probing.
Our experiments with the rolling rig revealed two problems. First, the big lightpainting visualizations were hard to read, and second, the large rig made it difficult to explore different urban sites. A combination of too many parameters and unwieldy equipment made it difficult for us to conduct the broad range of tests that we needed to find communicative patterns.
In order to start with some fresh experiments, we built a smaller, handheld light-painting probe that just measured and displayed GPS accuracy from a single point, so that we could quickly walk around the city, perform quick visual experiments, and create multiple mappings successively.

The Orb
Probe
Photoshop Mockup
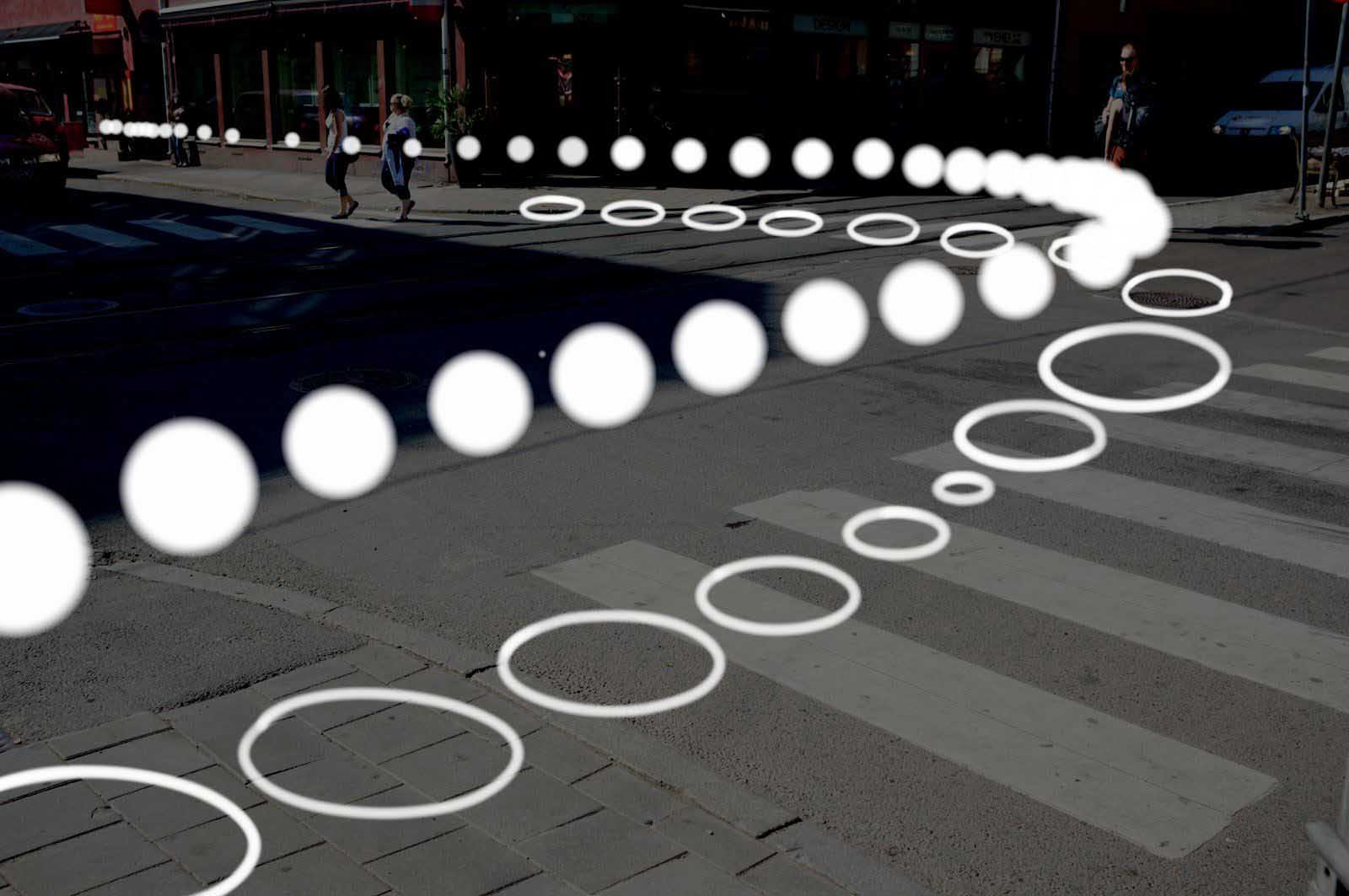
To simplify the visualizations, we moved from concepts of “light fields” or heatmaps to “traces” that measured a single point of light. We used Photoshop to create a mockup of what we hoped to get out of our visualizations.
Visual Storytelling
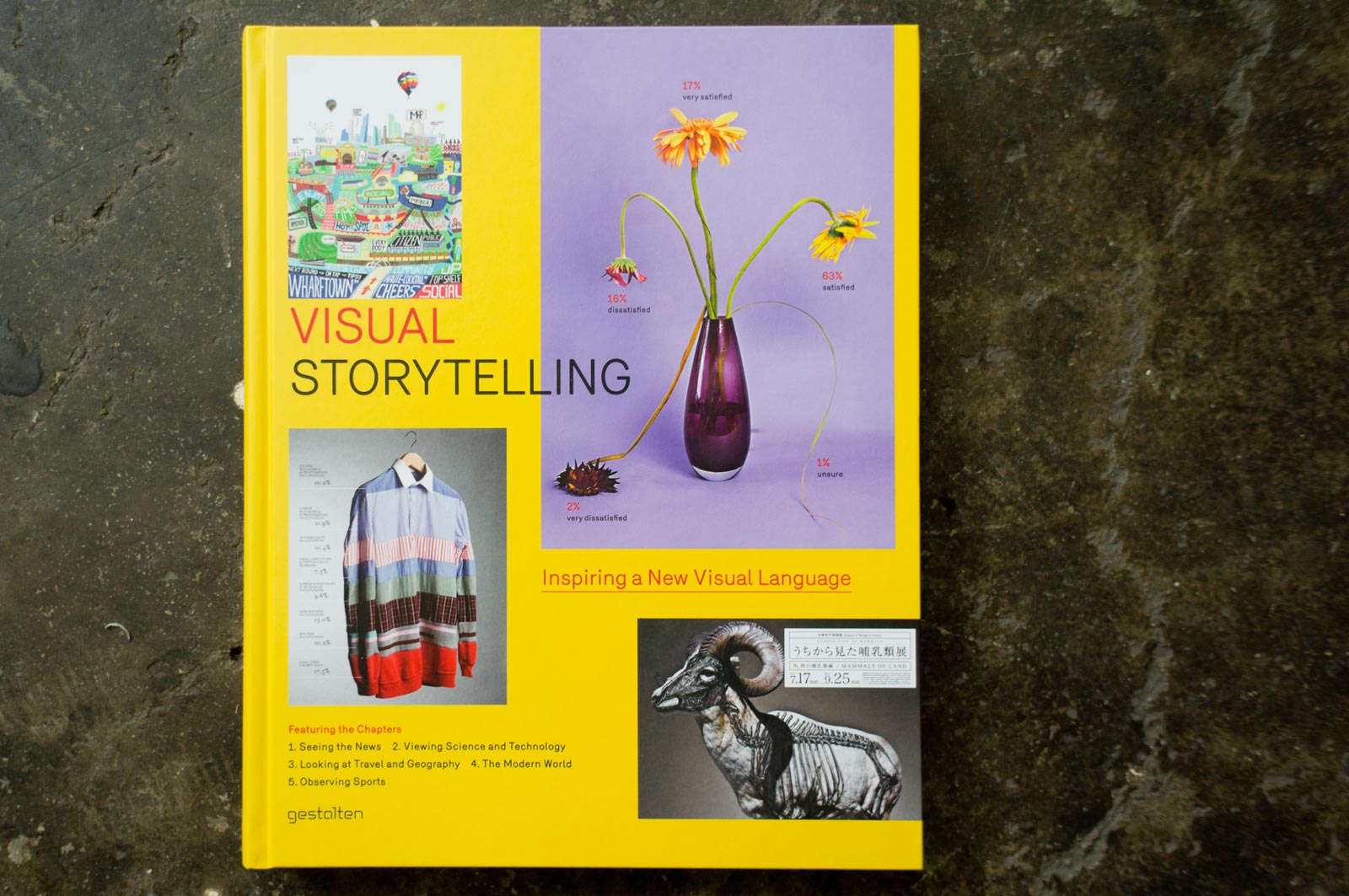
We wanted to experiment with a highly graphic approach to visualising GPS accuracy, one that could almost be read as a diagram. We were inspired by other colorful approaches to visualizing complex data (Klanten, Ehmann, & Schulze, 2011).
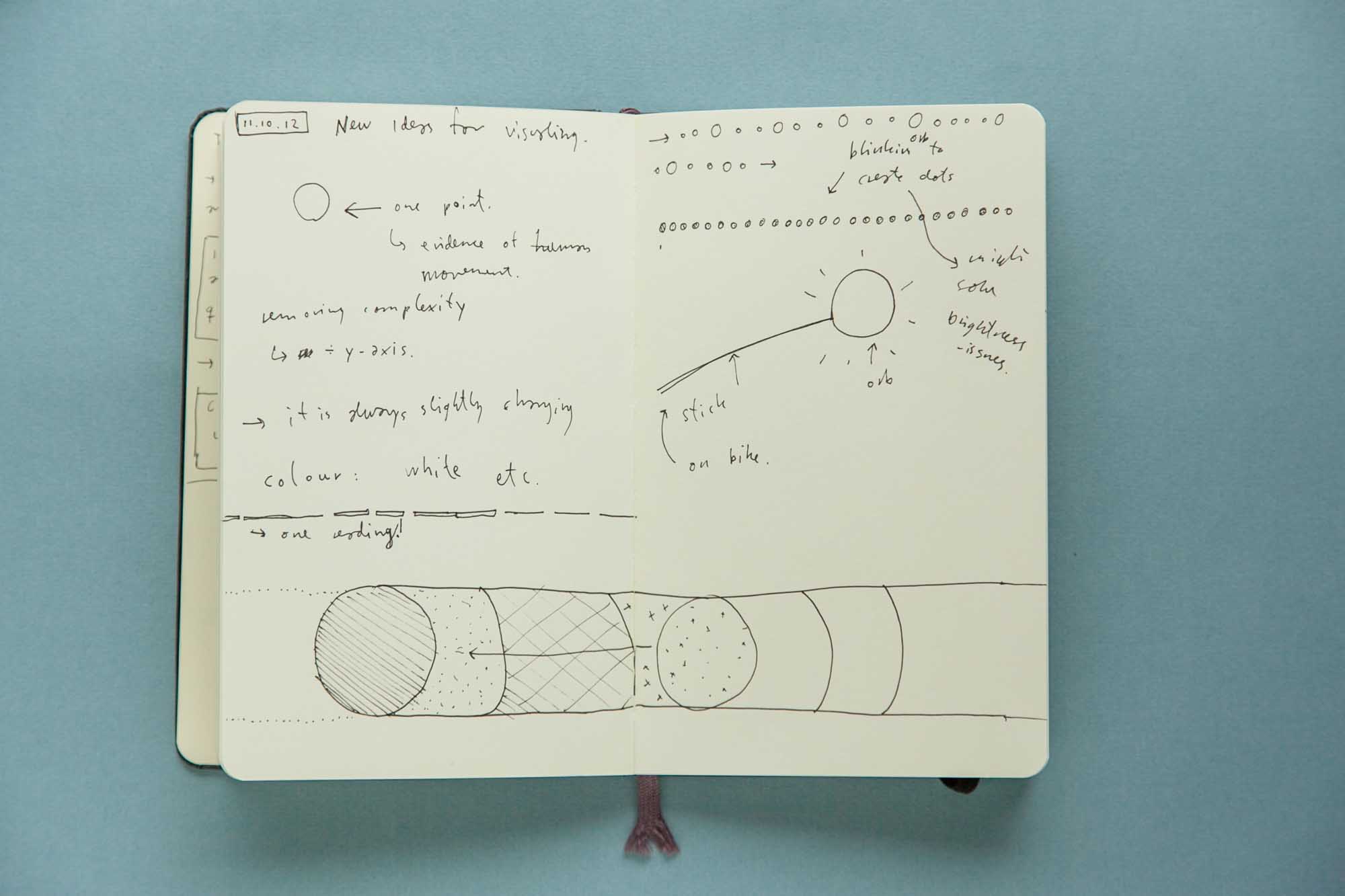
New Ideas for Visualizing
To achieve these light traces we invented an instrument that can be best described as an orb of light on a stick. By moving this orb through space while blinking the light, we would create highly graphic, colorful dots in an image that would make GPS accuracy more readable.
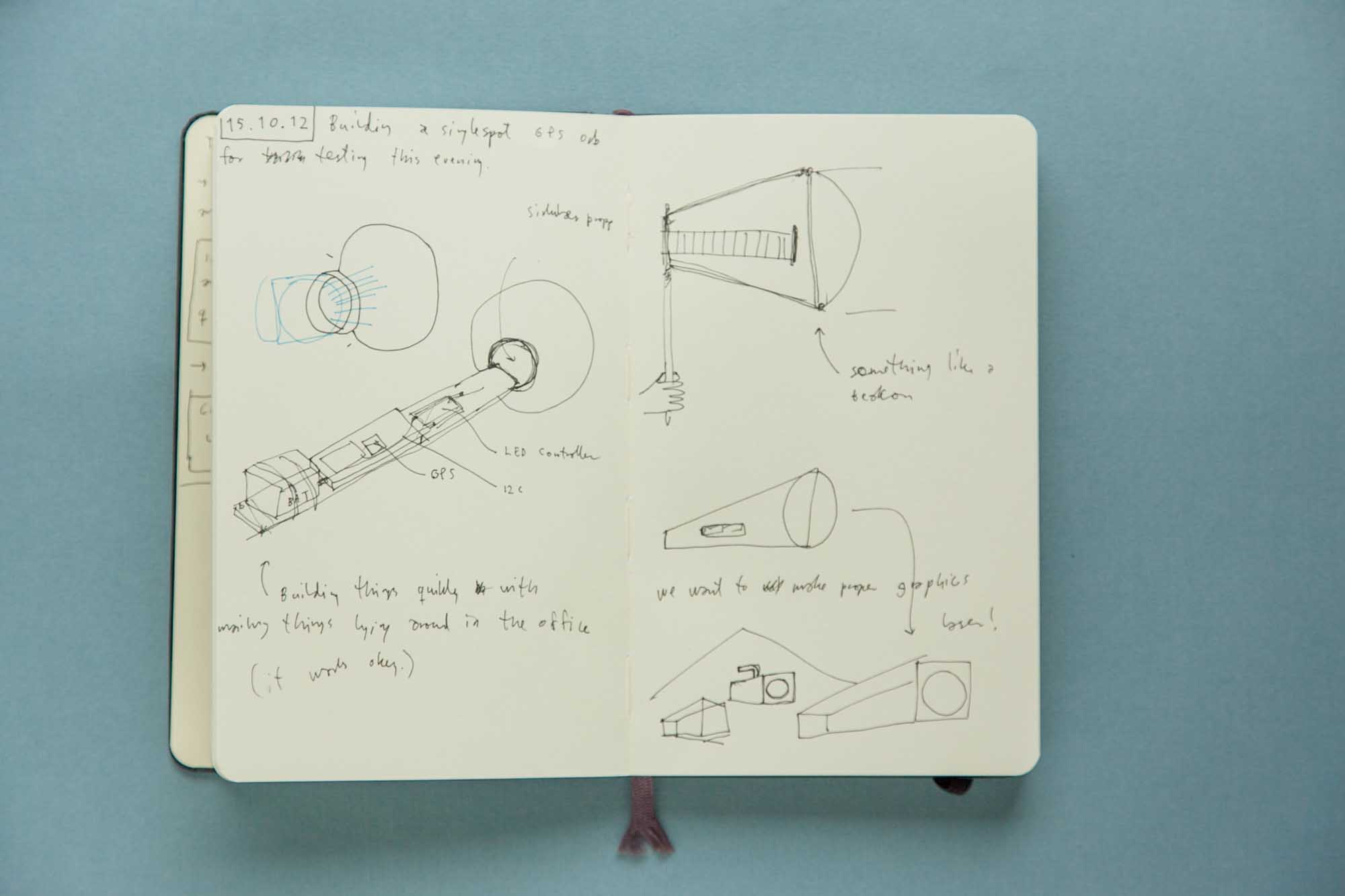
Prototyping a New Rig
To avoid losing momentum in the process, we built this new probe very quickly, using parts from the previous rig and things we found in our design studio, using an off-the-shelf bathroom light fitting from a hardware shop.

Testing Colors
One of our first tests of the orb probe, we made the decision to use distinctive colors that could clearly distinguish between different GPS accuracies. This was an indoor probe to test how effective the different colors were in the image.

Here we see the probe being calibrated before setting out into the city.
This probe was built in one day, and images were tested on the same night. It shifted our working pace from long iterations up to a very fast overnight turnaround of new experiments. This was an important and much-needed shift in our exploratory process. With a probe that was light and fast, it was possible for us to go out and explore the city.

Patterns
Over Time

Walking
With just two of us, we brought the orb with us outside. While one person carried the orb, the other walked in front, setting up the camera for quick test exposures to see how the orb behaved over time in various urban situations. We set the GPS values to correspond to three very distinctive colours: Red = Poor; Blue = Medium; White = Great.

Leapfrogging
Leapfrogging our way through the city, we would position the camera, capture an image, then find a new camera position. We could make lots of mappings in a short space of time and see the differences between spaces and times.

Mobility
The mobility of the rig meant that we could cover many urban sites quickly. We could see different kinds of spaces: open areas, built-up areas, and the transitions between them.

Red
With the lightweight orb probe we mapped the same spaces several times, walking around large buildings looking for changes. This image and the following ones show sequential exposures that have completely different GPS values. Here the probe is red, meaning that the accuracy is poor.

Blue
Immediately afterwards we walk across the same space again, and now the probe gave a blue response, meaning a medium accuracy.

White
A few minutes later, turning around and moving back towards the camera, we do the same mapping again and we see that one part of the space is blue and one part is white, meaning that the accuracy moves from poor to excellent. In the time it has taken to create this sequence (less than 20 minutes), GPS accuracy in this space has completely changed.
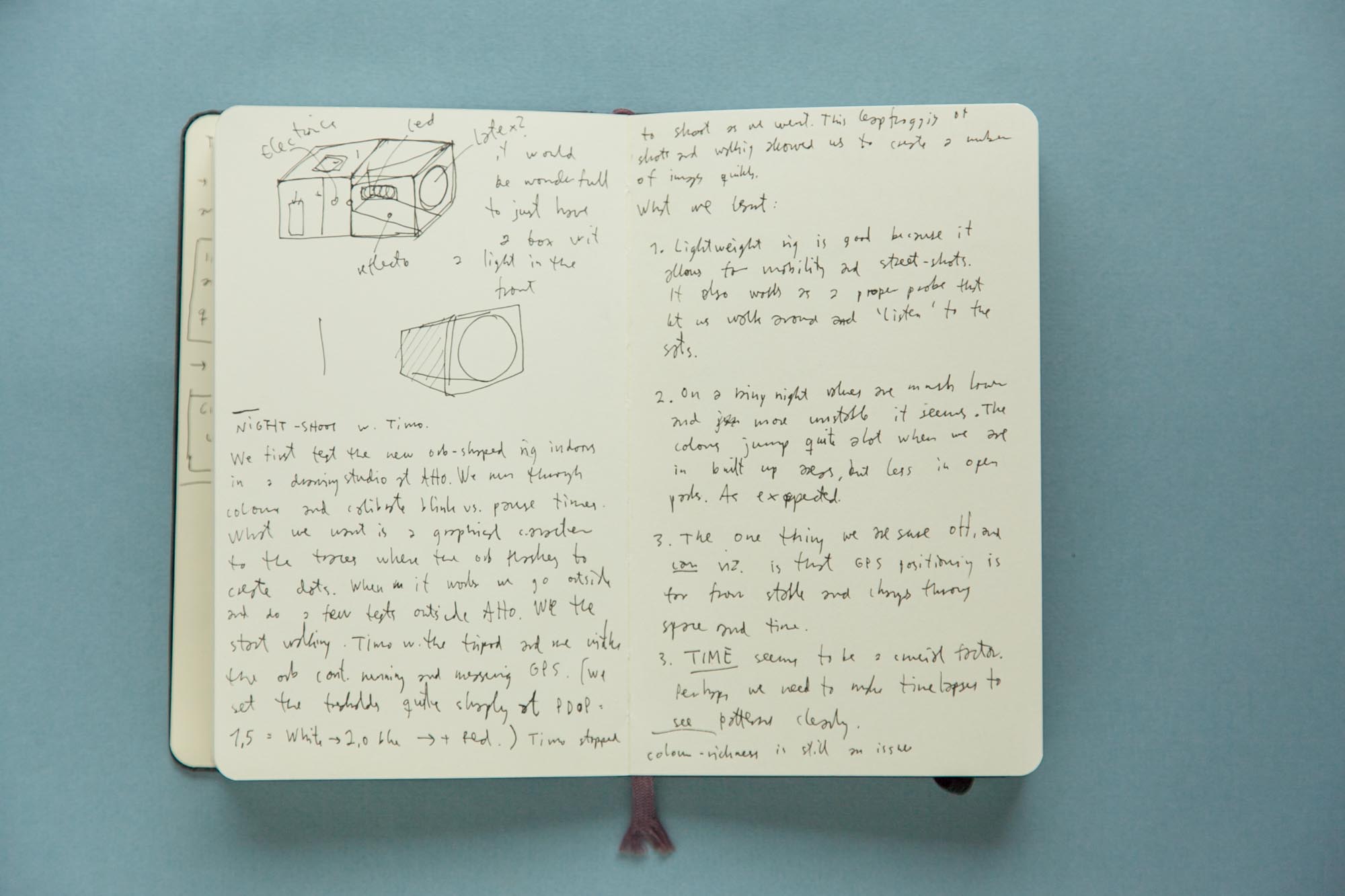
Notebook (2012, October 15)
“The one thing we are sure of, and can visualize, is that GPS positioning is far from stable and changes through space and time. TIME seems to be a crucial factor; perhaps we need to make timelapses to see patterns clearly.”
In repeating walks many times along the same routes, we discovered that we couldn’t get repeatable readings. Sometimes accuracy would go down next to a building; sometimes it would go up. There were many reasons for this, but the key reason is that GPS accuracy varies just as much (perhaps more) over time as it does in relation to space.
When read in sequence, our new visual mappings were now temporal as well as spatial. They showed us how GPS accuracy changed within an urban environment over time. With the long exposure times, our light painting technique was not only conflating time and space, but was also exaggerating temporal errors and latency in the GPS system. We realized that we had to find new techniques to more effectively show changes over time.
Timelapse
What we discovered with our more nimble orb probe is that GPS in the city is temporally unstable; as satellites pass overhead and get occluded by the urban environment, the uncertainty changes significantly. This required us to reconsider GPS as a temporal phenomena. We needed to find ways to measure GPS accuracy from various points and to look for patterns over time.
Some initial questions arose: what are the timescales over which significant changes occur? Twenty minutes, one hour, five hours? We decided to build new software tools for mapping GPS uncertainty over time, and in this next gallery we look at how these tools evolved.

GPS Over Time
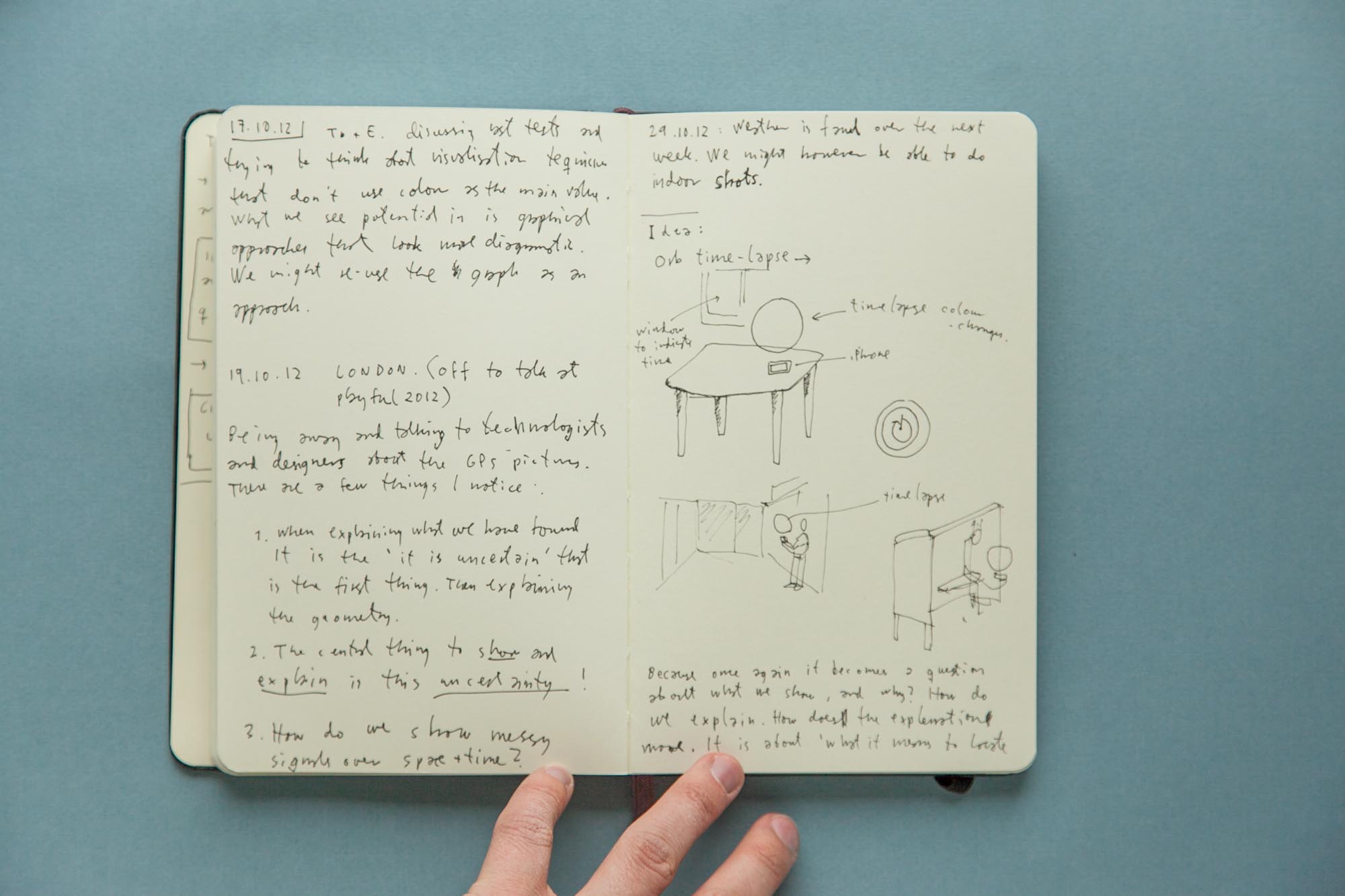
Notebook (2012, October 15)
“The central thing to show and explain is the uncertainty. . . . How do we show messy signals over space+time?”

Kitchen Mapping
Mocking up visualization concepts in Photoshop. Here we explore the concept of doing a sequence of visual mappings in a kitchen, using a colored orb to display shifts in accuracy.
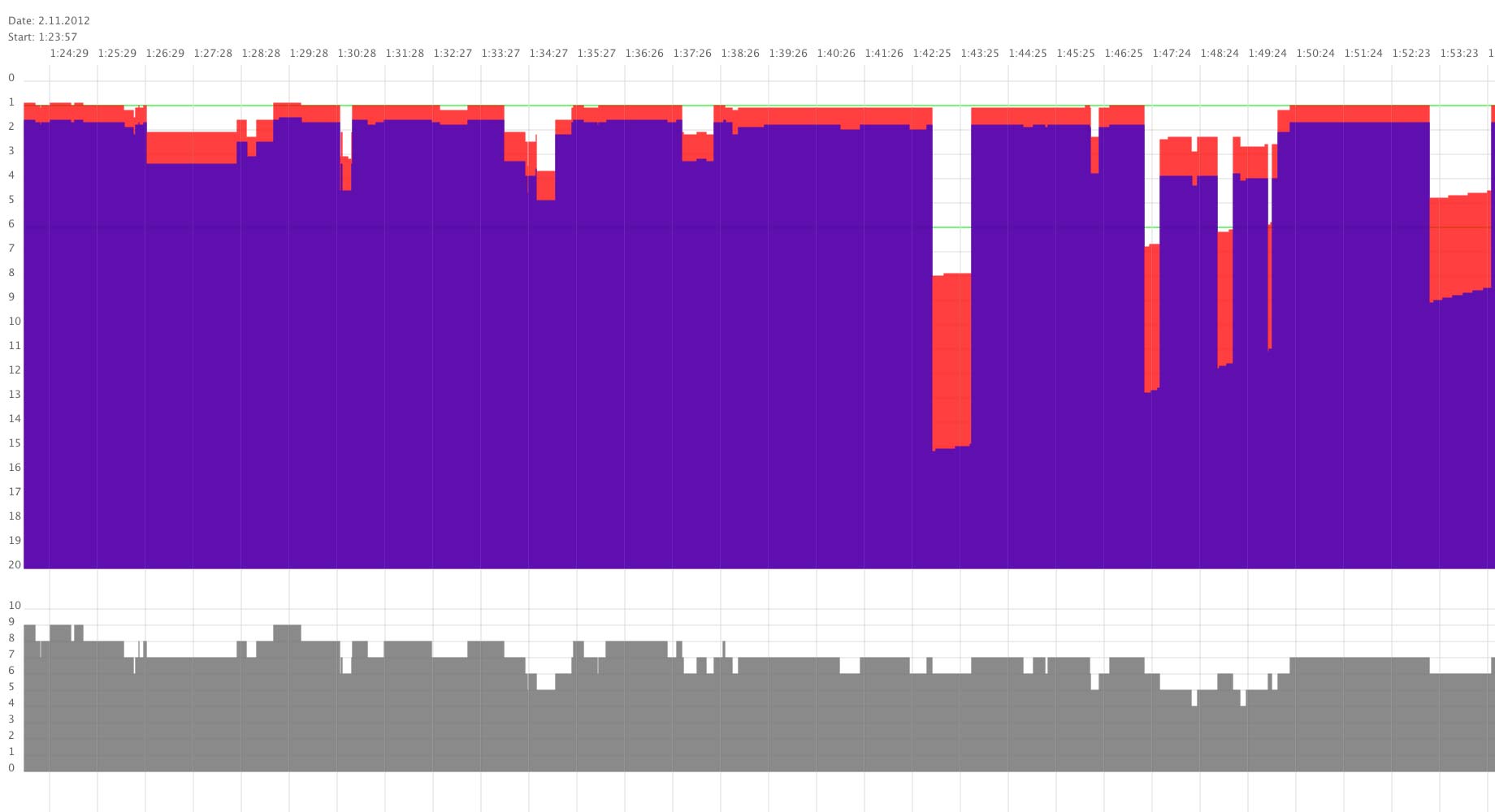
Accuracy Over Time
Here we have built a new piece of software that draws out GPS accuracy values and satellite numbers as a series of graphs. These graphs show the fluctuation of GPS accuracy for a single location. The graphs are continuously exported, 30 minutes per one A4 sheet of paper.

Wall of Graphs
To to observe and discuss broader patterns, we printed out ten hours of graphs and put them on our studio wall. What we saw was lots of sameness and sudden massive changes.
In these graphs of a stationary GPS receiver, we saw patterns that related to the movement of satellites overhead. We recorded many of these graphs in different locations, and could observe how the various physical environments affected the patterns in accuracy shifts.
To be able to show these patterns in context, we wanted to begin to use photography and filmmaking techniques. We knew that timelapse was a technique to compress phenomena that changes or moves over time. It’s popular in nature films, astronomy or as a narrative device in TV and cinema to show that time is passing. But, it has also been used for more experimental purposes, as in Michael Marantz's (2012) NYC Dark.
As our aim is to communicate about GPS, not just graph it, we wrote more software to be able to see what these changes would look like if they were turned into colored orbs and shown over time (from black to white).
We created some experiments with timelapses in code, using Processing software, shown above, where we turned accuracy values into the brightness of a graphic circle. This showed a really promising visualisation of the granularity of GPS at a particular point. It felt like we were finally seeing some of the material of GPS signals.
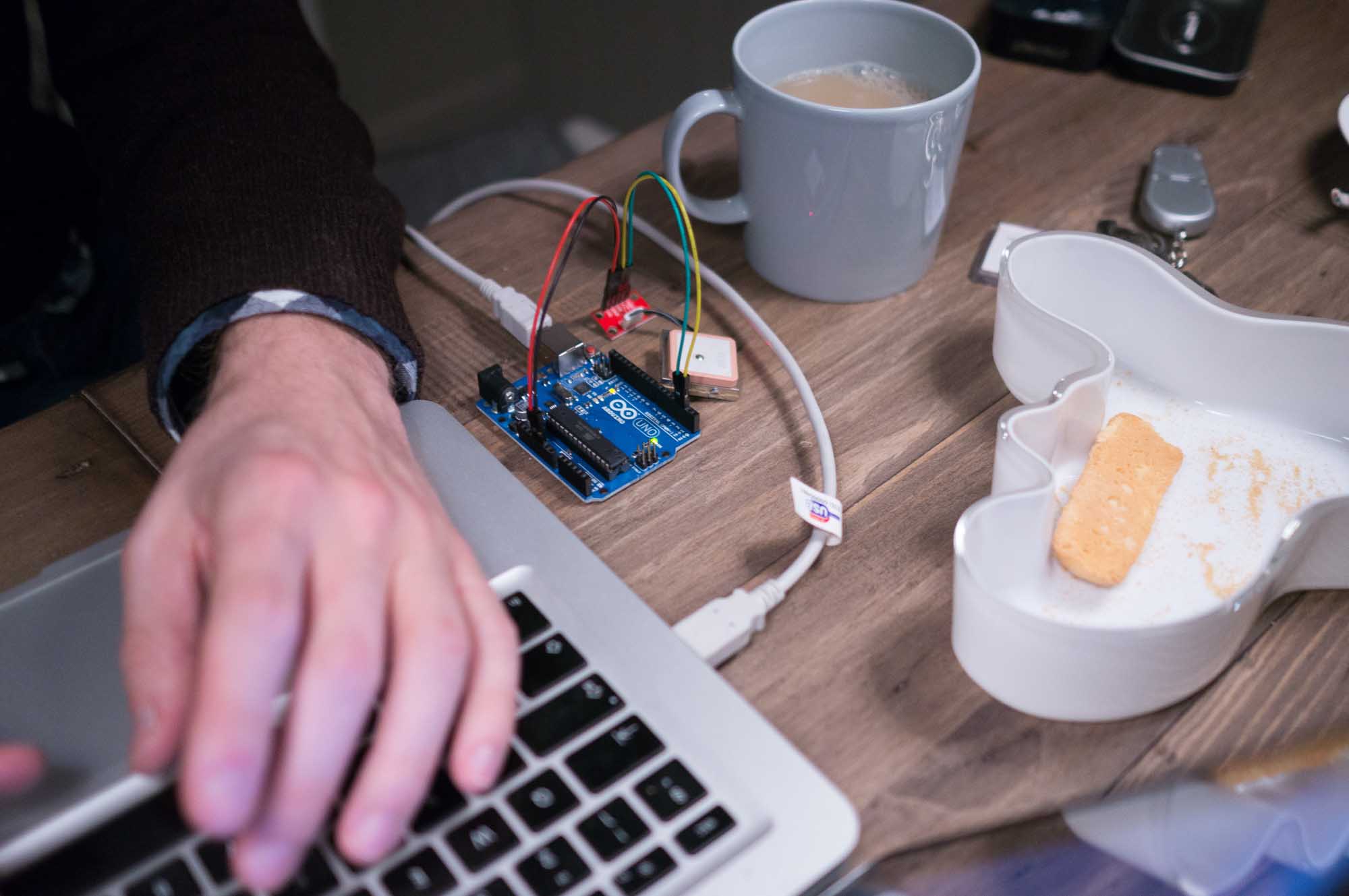
Inspired by this, we built a simple modification of our orb probe, a stationary lamp with a GPS receiver that would change color or brightness depending on GPS accuracy.

First Lamp Test

Color Test
We built a wooden box with a controllable light source covered by a glass sphere. The GPS receiver is inside the dome.

Window
We set it up indoors by a window where we thought we might see some interesting changes in accuracy. We set up the camera for shooting over long timeframes, as we did not know what kinds of patterns we would see.
Adjustments
As we were doing our first exposures and seeing the responses, we tweaked and adjusted the code to change color, thresholds, and ranges.

Photographic Setup
Here is a locked off camera with an external power supply ready to run for a few hours. Through tests, we found that using the brightness of pure white for the color was the best way of visualizing GPS accuracy. This is because drastic color changes were ugly, noisy, and made the scene look like a disco. Colored light transformed the room in a displeasing way, whereas changes in white light just subtly modulated the environment.
In this short sequence, we can clearly see how accuracy fluctuates over time. From our notebook:
We have made something that is beautiful, understandable and exciting. (Notebook, 2012)
Beyond this interesting timelapse, we also found that the lamp itself was a fascinating object to observe as a physical object. Sitting beside it, over the course of a few days, as it was responding in real time to GPS signals, we started to gain a nuanced understanding of how GPS was inhabiting different spaces. The lamp worked as a visualization of the specific accuracy pattern created by the environment in which it was placed.
We had finally found a method that reflected a material quality of GPS signals. We could also give a one-line explanation of what you see in the film:
This lamp is controlled by satellites
Spatial and Temporal
From our initial ideas of heatmaps, to explorations of spatial diagrams through a glowing orb, our development reached a point where we had to admit we didn’t yet have any visualizations that were communicative. Heatmaps were hard to read, the qualities they showed mixed the spatial and the temporal uncertainty in ways that muddled any explanation. They accurately reflected the odd phenomena of GPS, but not in a meaningful, communicative way.
So through iteration of our approach, we arrived at a more communicative way of showing the change in accuracy over time. This approach was measuring the temporal qualities of GPS accuracy, through a set of discrete probes and single points of light that could be photographed over time as timelapses. We had discovered a foundation for our communicative approach to GPS as an urban phenomena.
On Communicative Forms
Our first iterations of our GPS visualizations showed that we needed to rethink our communicative form. In this section, we have outlined processes of data-gathering and probing. Our experimentation led to a shift in focus from the spatial to the temporal.
Earlier we have argued that the spatial qualities of WiFi can be externalized through similar experimentation with rigs and light painting (Martinussen, 2012). In contrast, in this chapter we have shown that it is the combination of GPS’ temporal and spatial qualities that need to be given closer attention. This required a different set of design responses, and was an important turn in working to make visible the material and dynamic qualities of GPS. As Latour (2013) has repeatedly stated, we need to consistently challenge the surface assemblies of technology and expose their technological workings.
PAGE REFERENCES
- Klanten, Robert; Ehmann, Sven; & Schulze, Floyd. (Eds.). (2011). Visual storytelling: Inspiring a new visual language. Berlin, Germany: Gestalten.
- Latour, Bruno. (2013). An inquiry into modes of existence: An anthropology of the moderns. Cambridge, MA: Harvard University Press.
- Marantz, Michael. (Director). (2012). NYC Dark [Online video]. Retrieved December 3, 2013, from http://vimeo.com/52933219
- Martinussen, Einar Sneve. (2012). Making material of the networked city: Research by design and the renovation of practice. In Michael U. Hensel (Ed.), Design innovation for the built environment (pp. 235–247). London, England: Routledge.